Návody
Inštalácia programového prostredia MATLAB
O licenciu programu MATLAB si môžete požiadať na adrese foltin[at]humusoft.sk. Na váš e-mail príde oznámenie o začatí TRIAL licencie. Pomocou odkazu si vytvoríte konto, cez ktoré si môžete stiahnuť inštalátor MATLABu. Postup stiahnutia nájdete na nasledujúcom odkaze:
Priebeh inštalácie nájdete na nasledujúcom odkaze:
Počas inštalácie zvoľte nasledujúce produkty:
- MATLAB
- Simulink
- Stateflow
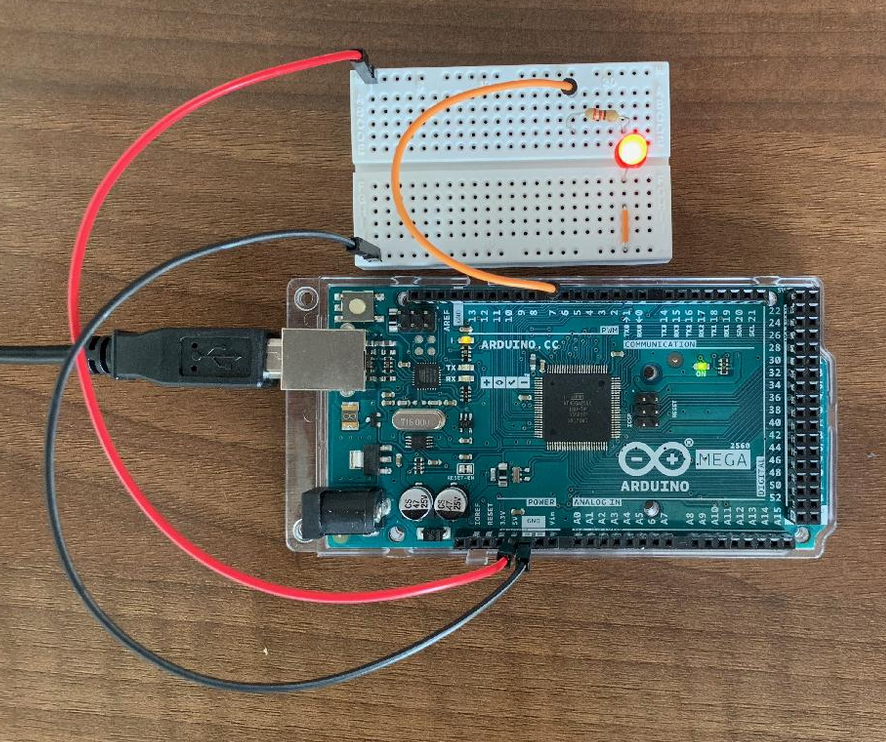
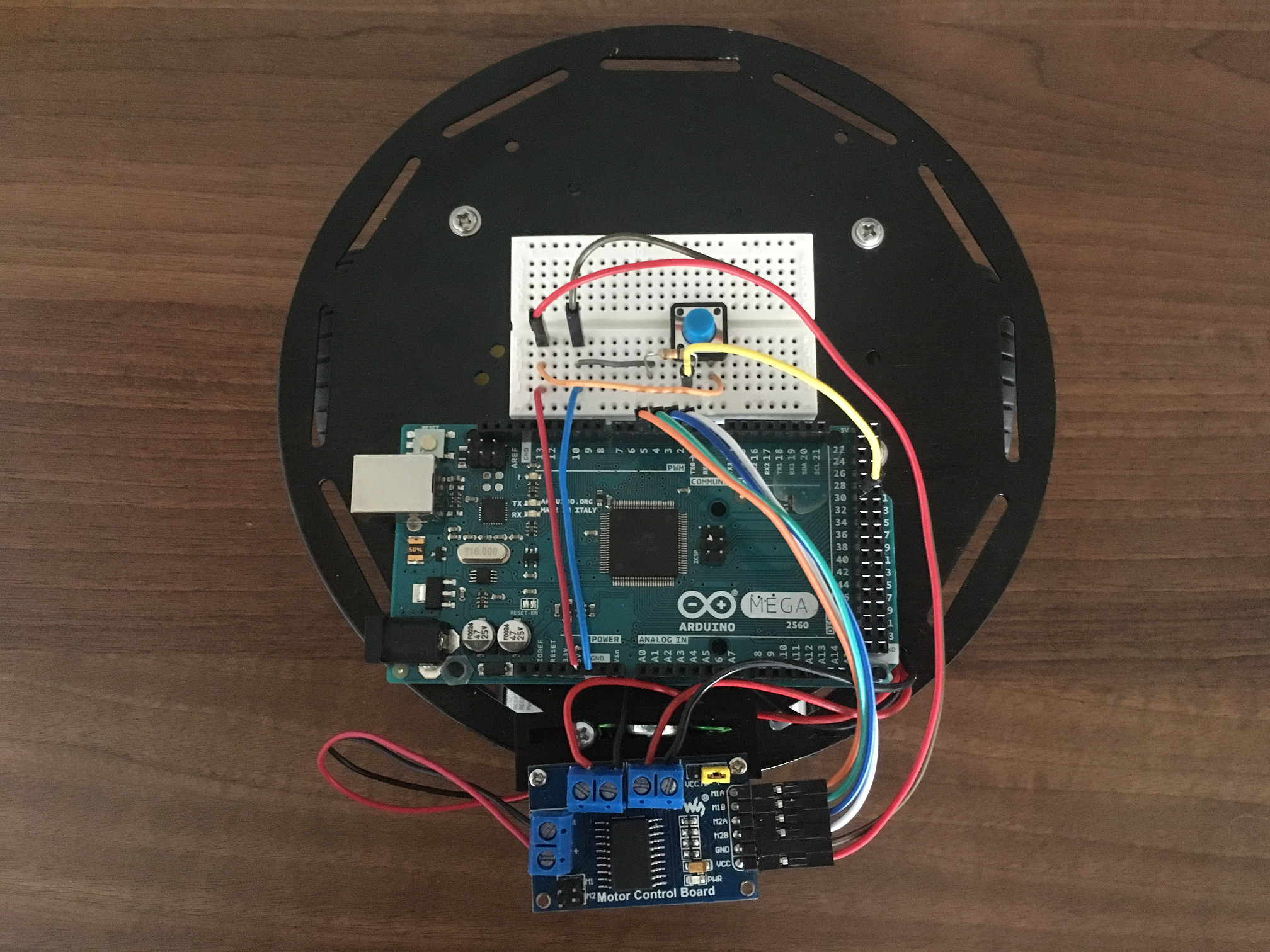
Hello world - blikanie ledkou D13
Najjednoduchšia vec aká ide s Arduino doskou spraviť. Rozblikáme LED číslo 13, ktorá je priamo na doske. Ak sa to podarí, znamená to, že počítač komunikuje s doskou a doska je pravdepodobne v poriadku.
Inštalácia podporných balíčkov pre MATLAB a Simulink
Arduino sa dá programovať aj s prostredia MATLAB/Simulink. V návode sa dozviete ako si svoj MATLAB rozšíriť o balíčky, ktoré sú na programovanie Arduino dosiek potrebné.
1 Arduino v prostredí MATLAB
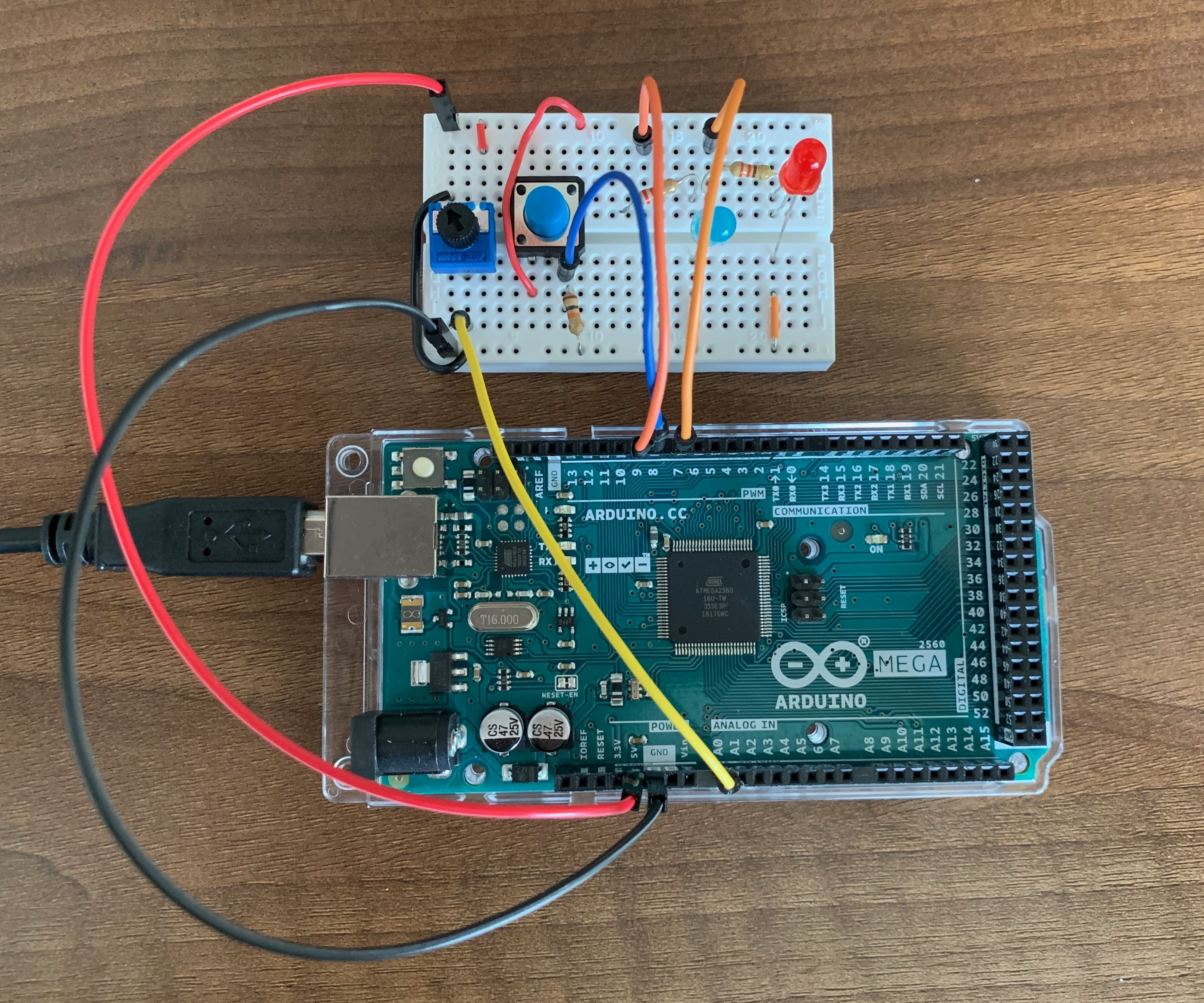
Prostredie MATLAB umožňuje komunikáciu s Arduinom pomocou podporného balíčka. MATLAB nahrá na Arduino komunikačný server, ktorý umožní zapisovať a čítať rôzne periférie. V tomto návode si pozrieme ako môžeme pracovať s digitálnymi a analógovými vstupmi a výstupmi.
2 Konfigurácia Simulink modelu pre beh na zariadení
Simulink je prostredie, v ktorom môžete vytvoriť model zariadenia a simulovať jeho správanie bez toho, aby ste mali skutočný hardvér k dispozícií. V tomto návode si ukážeme ako nakonfigurujeme model Simulinku tak, aby bežal na Arduine a povieme si o simulačných módoch.
3 Tvorba modelu
V predošlom návode sme si ukázali, ako môžeme ovládať Arduino z príkazového riadka MATLABu. V tomto návode si popíšeme, ako zostaviť simulačný model v Simulinku. Začneme prázdnym modelom, ktorý si nakonfigurujeme pre beh na Arduine podľa predchádzajúceho návodu. Model budeme rozširovať o bloky a spustíme ho v režime Monitor & Tune.
4 Arduino v prostredí Simulink
V tomto návode naviažeme na poznatky z predošlých návodov. Povieme si, ako môžeme v Simulinku pracovať s digitálnymi a analógovými vstupmi a výstupmi. Ukážeme využitie škálovania pre úpravu vstupov a výstupov. Na záver vytvoríme opäť samostatnú aplikáciu pre Arduino.
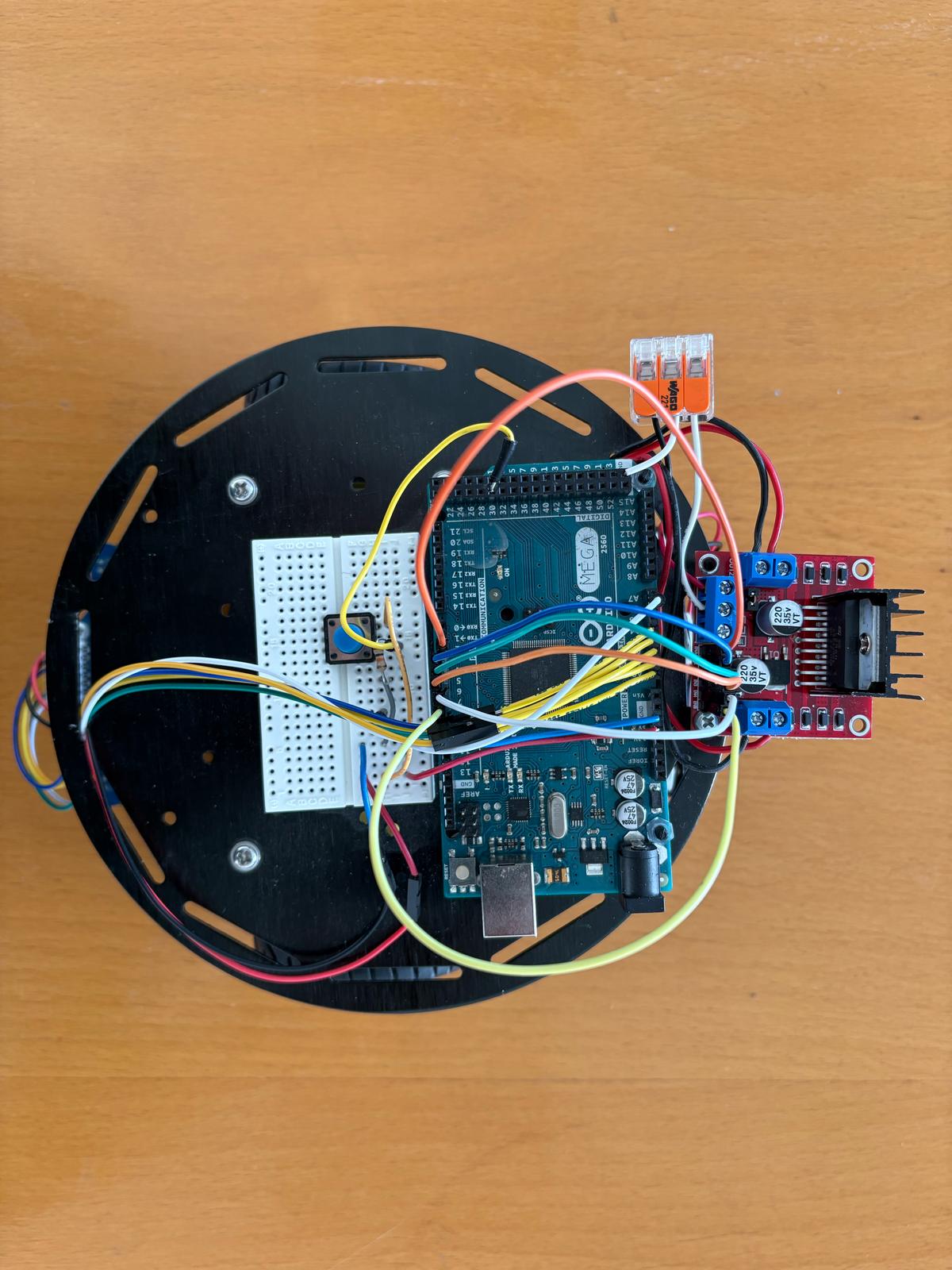
5 Ovládanie jednosmerných motorov
V tomto návode si ukážeme ako môžeme hýbať motormi robota. Ovládanie si najskôr vyskúšame v MATLABe priamo, aby sme zistili smer otáčania jednotlivých kolies. Neskôr prejdeme do Simulinku a ukážeme si zapojenie jednotlivých blokov tak, aby sme vedeli ovládať motory v ďalších úlohách.
6 Modelovanie postupnosti krokov v prostredí Stateflow
Pri riadení zariadení častokrát vykonávame určité postupnosti krokov. Pri robotovi chceme napríklad ísť chvíľku dopredu, zastaviť a následne sa otočiť do strany. V tomto návode si ukážeme, ako môžeme túto postupnosť krokov modelovať v nadstavbe MATLABu a Simulinku, ktorá sa nazýva Stateflow.
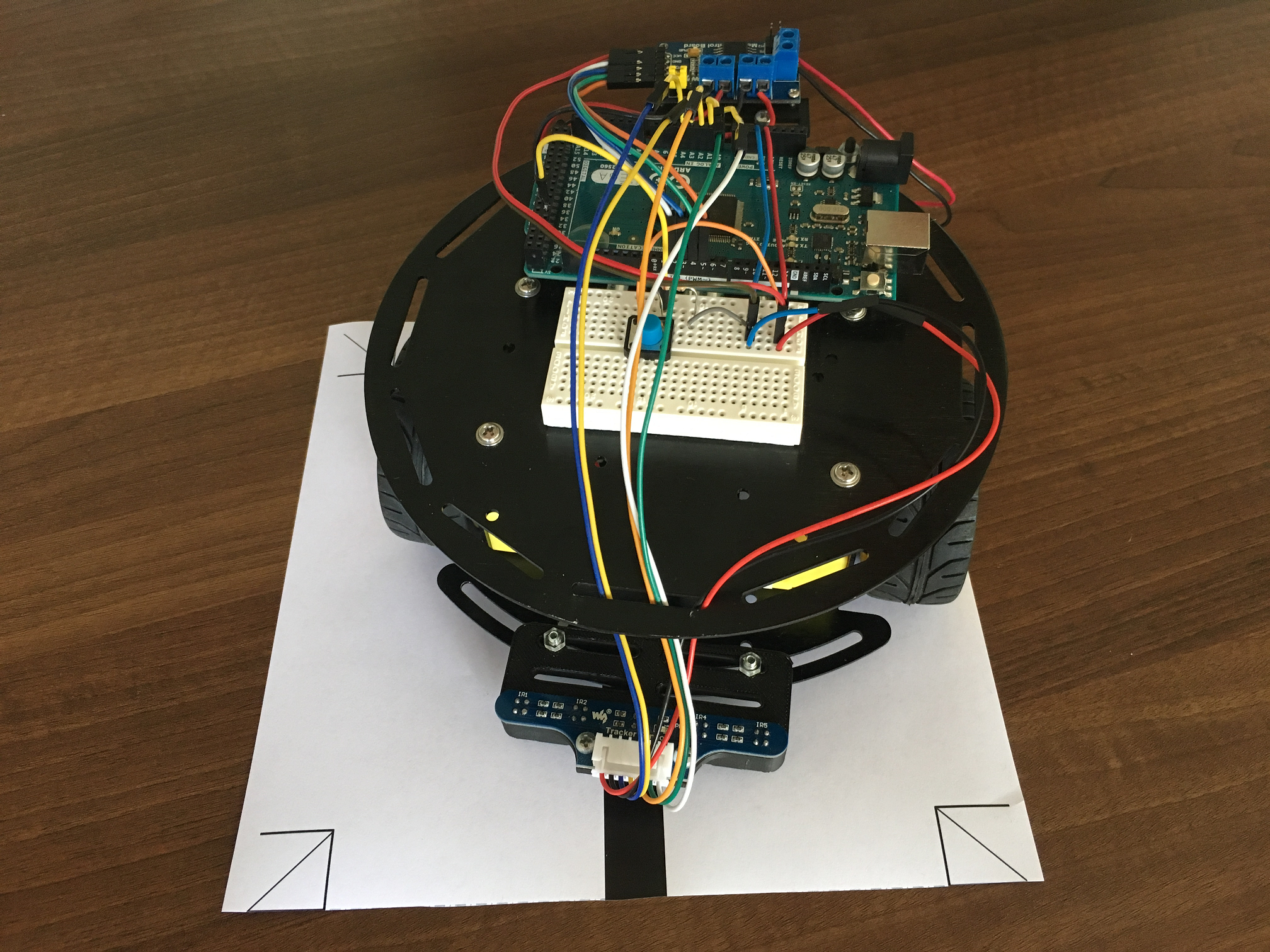
7 Snímanie čiary
V predchádzajúcich návodoch sme si ukázali, ako môžeme ovládať motory a s robotom pomocou Stateflow namodelovať postupnosť operácií. Ako ale zabezpečíme, aby robot sledoval čiaru? Na sledovanie čiary potrebujeme snímač, ktorý rozlíši či je pod ním biela alebo čierna farba. V tomto návode si povieme o snímači, ktorý je dostupný v stavebnici.
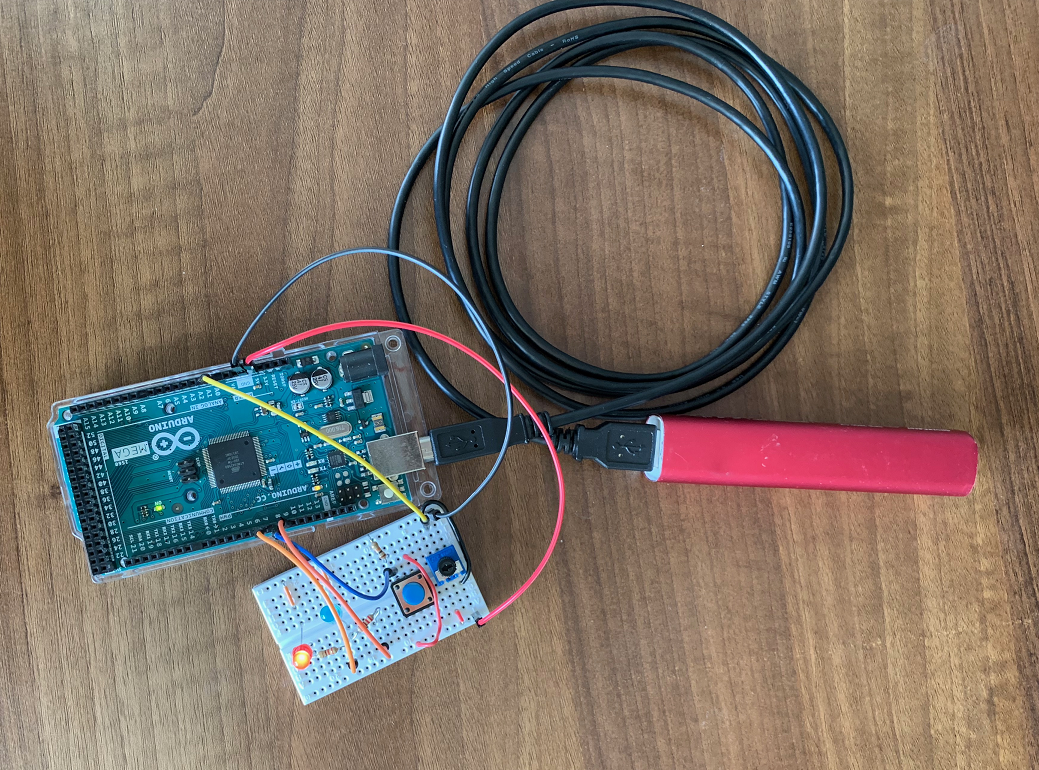
Snímanie vzdialenosti
V tomto návode si ukážeme ako môžeme pomocou ultrazvukového snímača merať vzdialenosť.

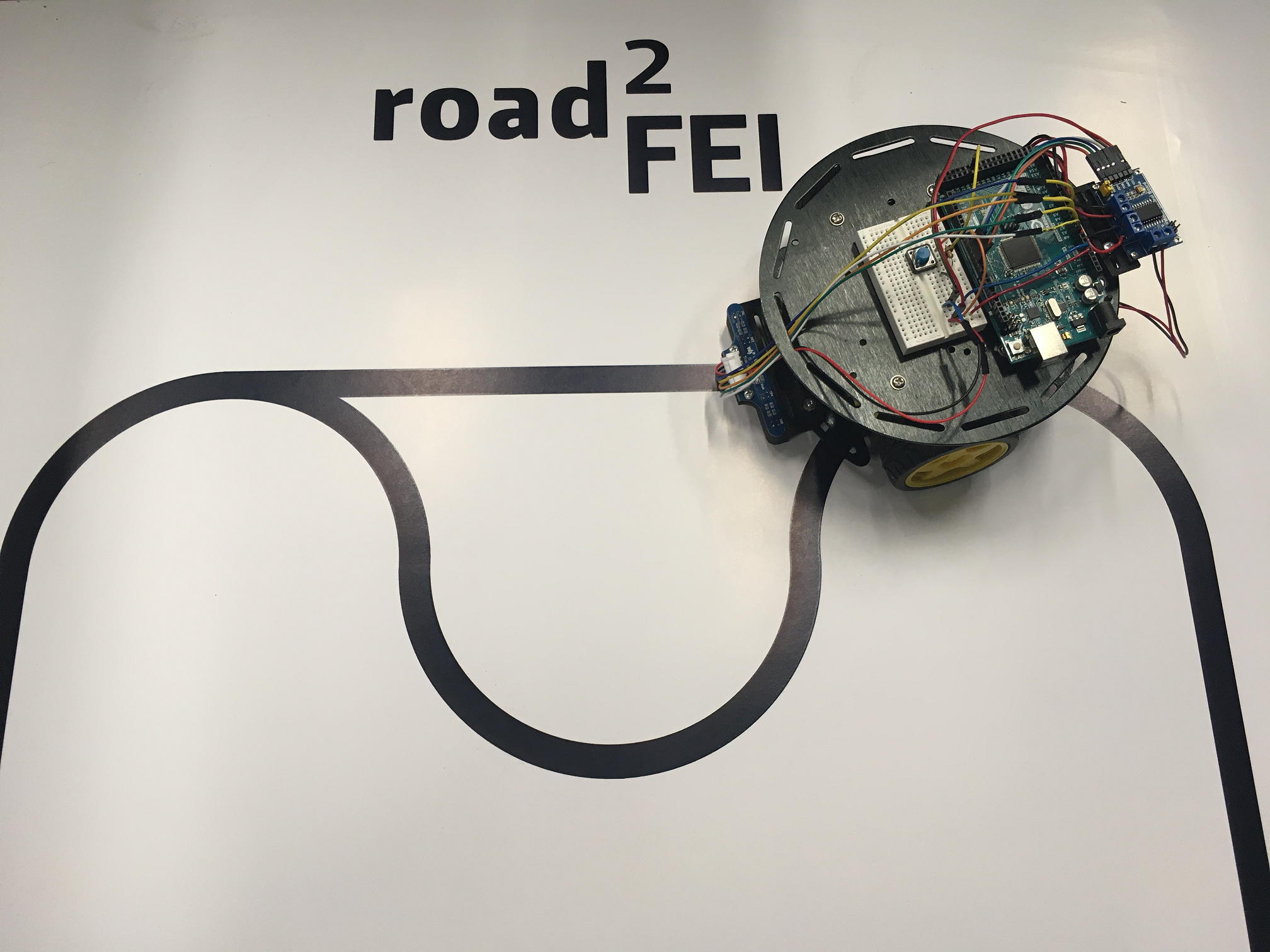
8 Sledovanie čiary s pomocou Stateflow
V predchádzajúcich návodoch sme si pripravili bloky/subsystémy, ktoré využijeme na hlavnú úlohu celej súťaže a to je sledovanie čiary. Existuje niekoľko spôsobov ako to dosiahnuť. V tomto návode si ukážeme ako môžeme sledovať čiaru pomocou binárnych výstupov zo snímačov čiary. Znamená to, že máme k dispozícii informáciu, či je pod snímačom čiara (logická 1) alebo nie je (logická 0). Túto informáciu využijeme v prostredí Stateflow na vytvorenie rozhodovacej logiky správania robota tak, aby sledoval čiaru.
9 Sledovanie čiary pomocou PID regulátora
V predchádzajúcom návode sme si ukázali, ako môžeme sledovať čiaru pomocou stavového automatu a binárnych výstupov zo snímačov. Aby sme moli reagovať na kombináciu všetkých výstupov zo snímačov pomocou váženého priemeru priebežne musíme využiť iný typ regulátora - PID regulátor. V tomto návode si ukážeme ako vieme vytvoriť schému s regulátorom.
10 Sledovanie čiary pomocou Stateflow a PID regulátora
V predchádzajúcom návode sme si ukázali, ako môžeme sledovať čiaru pomocou PID regulátora. Ak by sme chceli okrem sledovania čiary pridať ďalšie časti algoritmu (postupnosti krokov), schéma by bola s využitím blokov komplikovaná a menej prehľadná na ladenie. Z návodov o postupnosti tiež vieme, že postupnosť krokov sa ľahko modeluje v prostredí Stateflow. V tomto návode si ukážeme ako vieme integrovať PID regulátor ako stav Stateflowu.